

Lastenhefte sind kompliziert. Lassen Sie uns jegliche Verwirrung beseitigen, indem wir neun gängige Begriffe durchgehen, die jeder Laserscanning-Profi kennen sollte.
Wenn Sie auf der Suche nach einem mobiles Mapping System sind, haben Sie wahrscheinlich schon mehr als ein oder zwei Stunden damit verbracht, Datenblätter durchzusehen. Dabei sind Sie wahrscheinlich auf die eine oder andere verwirrende Angabe gestoßen. "Was zum Teufel ist eine Laserklasse?", werden Sie sich vielleicht fragen. "...und warum sollte mich das interessieren?"
Heute wollen wir das Geheimnis der Lidar-Spezifikationen lüften, indem wir Ihnen einige Begriffe aus dem NavVis VLX Spezifikationsblatt. Wir erklären Ihnen die obskureren Spezifikationen, was sie bedeuten und warum sie für Ihre Arbeit wichtig (oder unwichtig) sind.
Bevor wir beginnen, sollten Sie beachten, dass andere Hersteller möglicherweise eine etwas andere Terminologie verwenden als NavVis tut. Aber die Ideen, die Sie hier lernen, sollten Ihnen helfen, sich auch in deren Datenblättern zurechtzufinden.
Los geht‘s!
Schichten bzw. Layers
(Manchmal auch als Kanäle bezeichnet). Die Anzahl der Laser, die der Scanner zur Erfassung einer Punktwolke verwendet. NavVis VLX nutzt zwei LiDAR-Sensoren mit jeweils 16 Schichten, was insgesamt 32 Schichten ergibt.
Warum ist das wichtig?
Je mehr Laser ein Scanner verwendet, desto schneller kann er eine Szene erfassen. Und desto schneller kann er sich bewegen und trotzdem eine hohe Auflösung erreichen.
Geräte, die für schnellere Anwendungen konzipiert sind, wie z. B. die Kartierung vom Dach eines fahrenden Autos aus, verwenden Lidar-Sensoren mit mehr Schichten. Dadurch können sie mehr Punkte in einem bestimmten Zeitraum erfassen und eine ausreichend hohe Auflösung für den beabsichtigten Einsatz gewährleisten. Scanner für langsamere Anwendungen, wie die Kartierung von Innenräumen, können die gleiche Auflösung mit (relativ) weniger Schichten erreichen.
Punkte pro Sekunde
"Damit bezeichnet man die Anzahl der Messungen, die der Scanner in einer Sekunde erfassen kann."
Warum ist das wichtig?
Mehr Messrate bedeutet, dass der Scanner unter sonst gleichen Bedingungen dichtere Punktwolken erfasst. Bedenken Sie jedoch, dass eine höhere Anzahl von Messrate nicht immer besser ist. Sobald Sie genügend Punkte in der Wolke für Ihre beabsichtigte Anwendung haben, wird Ihre Punktwolke durch die Erfassung von mehr Punkten größer und schwerer zu verarbeiten.
Laserklasse
Gibt an, wie gefährlich der Strahl für das menschliche Auge oder die Haut ist. Gemäß einem Leitfaden der US Food and Drug Administration (FDA) können Laser in vier Klassen eingeteilt werden.
Warum ist das wichtig?
"Die Klassifizierung bietet die Gewähr, dass der Scanner sicher verwendet werden kann."
Praktisch alle Lidar-Scanner verwenden Laser der Klasse 1, der sichersten Klasse. Das bedeutet, dass der Scanner völlig harmlos ist, so dass Sie (oder ein Passant) ohne Augenschutz direkt in den Scanner schauen können und keine negativen Auswirkungen verspüren.
Bei Klasse 2 beginnt der Laser, das Auge zu reizen. Bei Klasse 3 kann ein längeres Betrachten des Lasers ohne Augenschutz zu Schäden führen. Laser der Klasse 4 können einen Brand verursachen oder Ihre Augen oder Ihre Haut verbrennen. Denken Sie an einen Science-Fiction-Laserstrahl.
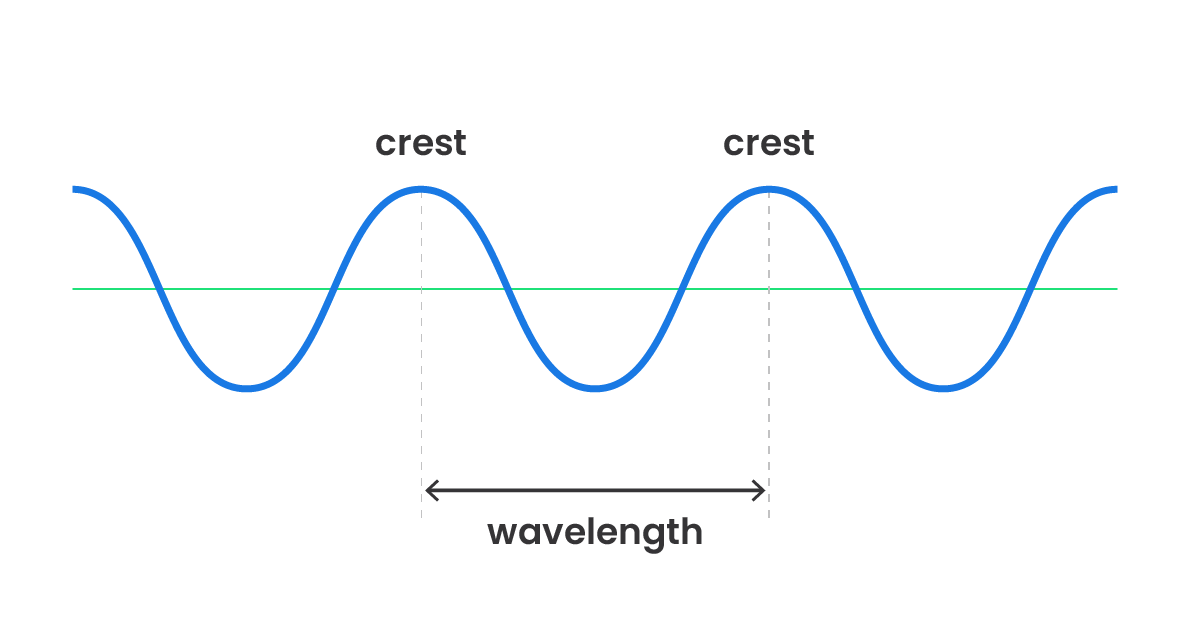
Wellenlänge
Der Abstand zwischen aufeinanderfolgenden Wellenbergen in einem Lichtstrahl (siehe Abbildung). Sichtbares Licht hat eine Wellenlänge von 400-700 Nanometern (nm) und die Wellenlänge bestimmt die Farbe, die Sie sehen.
Lidar-Sensoren verwenden in der Regel entweder ~905 nm oder ~1550 nm, die beide für das menschliche Auge unsichtbar sind, laut FDA sicher verwendet werden können und in der Lage sind, Hunderte von Metern zurückzulegen.
Warum ist das wichtig?
Velodyne hat einen großartigen Blogbeitrag verfasst, der die Bedeutung der Wellenlängen in einfachen Worten erklärt. Er geht aber auch tiefer, als Sie es vielleicht brauchen, daher hier die Kurzfassung.
Die Wahl von Wellenlänge hat einen großen Einfluss auf die Leistung des Lasers. Ein ~1550-nm-Laser wird eher von Wasser in der Umgebung absorbiert, wie z. B. Nebel, Regen oder sogar Luftfeuchtigkeit. Um diesem Problem entgegenzuwirken, müsste der Laser mehr Strom verbrauchen, was eine kürzere Lebensdauer der Batterie bedeutet. Ein 905-nm-Laser verliert unter diesen Bedingungen nicht an Leistung und ist viel einfacher herzustellen.
Reichweite bzw. Range
"Mit diesem Kennwert beziffert man die maximale (und manchmal minimale) Entfernung, in der der Laser ein Objekt erkennen kann."
Warum ist das wichtig?
Oberflächlich betrachtet ist das ganz einfach: Die Reichweite gibt an, wie weit Ihr Scanner von einem Objekt entfernt sein kann und trotzdem brauchbare Ergebnisse liefert.
Gehen Sie jedoch nicht davon aus, dass diese Zahl die Entfernung angibt, die ein Laserscanner erfassen kann, ohne die auf dem Datenblatt angegebene Genauigkeit zu überschreiten. Rigorose Tests (und Erfahrungen vor Ort) zeigen, dass die Genauigkeit eines Laserscanners abnimmt, je weiter er sich vom Objekt entfernt. (Darüber hinaus gibt es eine Vielzahl anderer Faktoren, die die Genauigkeit eines Lidar-Sensors beeinflussen können, selbst bei konstanter Entfernung. Das gilt vor allem, wenn es sich um mobiles Mapping handelt, bei dem die Software in die Gleichung einfließt).
Auch wenn die Reichweite eine nützliche Angabe ist, sollten Sie sich nicht darauf verlassen, dass sie ein absolutes Maß dafür ist, wie weit Sie für Ihre spezielle Anwendung erfassen können. Um dies genau zu bestimmen, müssen Sie eine Reihe strenger Feldtests mit dem Scanner durchführen, bei denen Sie mit unterschiedlichen Reichweiten und in verschiedenen Umgebungen arbeiten. Das würde Ihnen zeigen, wie weit ein Scanner auf Ihren Baustellen erfassen kann und dennoch Daten liefert, die den von Ihnen benötigten Qualitätsspezifikationen entsprechen.
Die gute Nachricht ist, dass NavVis diese Art von Tests bereits durchgeführt hat für NavVis VLX. Die Genauigkeit, die dieses Gerät bei verschiedenen Reichweiten und in verschiedenen Umgebungen erreichen kann, finden Sie im White Paper NavVis VLX Genauigkeit.
IP-Klassifizierung
Der Begriff ist umstritten - manche sagen, er stehe für Ingress Protection, andere sagen International Protection Rating. Wie auch immer, es klassifiziert den Grad des Schutzes, den ein elektronisches Gerät bietet, um das Eindringen von Staub oder Flüssigkeiten zu verhindern, die den internen Schaltkreisen schaden könnten.
Warum ist das wichtig?
Wenn elektronische Geräte nass werden, kann das zu großen Problemen führen (wie Sie wissen, wenn Ihnen Ihr Telefon schon einmal in eine Wasserlache gefallen ist). Die Wahl eines Scanners mit der richtigen IP-Einstufung kann Sie davor bewahren, mit Ihrer Investition derartiges Leid zu erfahren, da die Zahl einen zuverlässigen Hinweis darauf gibt, welche Umgebungen das Gerät sicher bewältigen kann.
Ein robuster Scanner, der für den Einsatz in rauen Umgebungen gebaut wurde - wie z. B. auf einer aktiven Konstruktion oder einer feuchten Baustelle im Freien - hat oft eine IP-Schutzart von 54. Das bedeutet, dass er bis zu einem gewissen Grad gegen das Eindringen von Staub geschützt ist und dass er vor Strahlwasser aus allen Richtungen geschützt ist. Scanner mit dieser Schutzart sind in der Regel teurer und auf die Verwendung an Land beschränkt.
NavVis VLX hat die Schutzart IP 42, d. h. es ist gegen feste Gegenstände über 1 mm geschützt und hält Spritzwasser aus jeder Richtung stand.

Genauigkeit
Bevor wir zu den Begriffen kommen, ein kurzer Hinweis: Die Genauigkeitsangaben für einen mobilen Scanner sind etwas differenzierter als bei einem terrestrischen Scanner. Das liegt daran, dass ein terrestrischer Scanner Punkte von einem festen Standort im Raum erfasst, während ein mobiler Scanner Punkte erfasst, während Sie sich bewegen - was bedeutet, dass ein SLAM Algorithmus eine umfangreiche Verarbeitung benötigt, um die Punkte korrekt im Raum zu platzieren.
Wenn die Idee von SLAM neu für Sie ist, lesen Sie unseren umfassenden Leitfaden hier.
Relative Genauigkeit
Die Genauigkeit einer Punktwolke in einem lokalen Maßstab. Bei einem mobilen Scanner ist dies die Messgenauigkeit zwischen Punkten an einem einzigen Ort wie einem Raum.
Warum ist das wichtig?
"Diese Kennzahl ist wichtig, um die Zuverlässigkeit eines Scanners zu bestimmen, da sie zeigen kann, wie genau die Abmessungen eines Raums sind - ein wichtiger Faktor für Anwendungen wie Scan-to-BIM oder die Erstellung von Grundrissen."
Absolute Genauigkeit
Die Genauigkeit der Punktwolke auf einer globalen Skala. Bei einem mobilen Scanner ist dies die Messgenauigkeit zwischen zwei Punkten, die vom Scanner nicht an einem einzigen Ort erfasst wurden. Zum Beispiel die Entfernung zwischen gegenüberliegenden Ecken eines Gebäudes.
Warum ist das wichtig?
globale Genauigkeit ist für die Bestimmung der Zuverlässigkeit eines mobilen Scanners von entscheidender Bedeutung, da sie den Umfang des Drift Fehlers verdeutlicht, der sich aufgrund von SLAM in großen oder komplexen Kartierungsprojekten ansammelt. Mit anderen Worten, er zeigt die Genauigkeit des Scanners über das gesamte Projekt hinweg an.
Sie wird auch als absolute Genauigkeit bezeichnet, da sie die Genauigkeit der Punktwolkenmessungen im Vergleich zu ihrer "wahren" Position in einem absoluten Koordinatensystem angibt, das durch eine Methode höherer Ordnung, wie z. B. Vermessung, d. h. Tachymetermessungen, bestimmt wurde.
Genauere Definitionen für diese Begriffe und weitere Einzelheiten darüber, wie NavVis diese Metrik für seine Scanner gemessen hat, finden Sie im Whitepaper NavVis VLX Accuracy (Genauigkeit).

Sean Higgins ist ein unabhängiger Technologieautor, ehemaliger Redakteur von Fachzeitschriften und Outdoor-Enthusiast. Er ist der Meinung, dass klares, schlagwortfreies Schreiben über 3D-Technologien ein öffentlicher Dienst ist.