Der endgültige Leitfaden für SLAM & mobiles Mapping
Die Entwicklung der SLAM
Aufgrund der rasanten Zunahme der Rechenleistung seit den 1980er Jahren - ganz zu schweigen von der Verfügbarkeit von frei herunterladbarem Code von Unternehmen wie Google - wird SLAM heute in einer Vielzahl von Anwendungen eingesetzt. Man findet sie in praktisch jeder Anwendung, in der eine Maschine eine Live-3D-Karte ihrer Umgebung benötigt, um zu funktionieren. Diese technologische Entwicklung hat uns geholfen zu verstehen, wie SLAM auf verschiedenen Plattformen und in verschiedenen Umgebungen implementiert werden kann, um die Möglichkeiten von mobiles Mapping Systemen zu verbessern.
Hier sind nur einige Anwendungen, die auf der SLAM Technologie basieren:
- Autonome Verbraucherrobotik (wie Drohnen oder Staubsauger)
- Selbstfahrende Autos
- Augmented-Reality-Anwendungen für Smartphones
- 3D-mobile Mapping-Systeme
Diese alltäglichen Produkte nutzen die gleichzeitige Lokalisierungs- und Kartierungstechnologie für eine präzise Echtzeitnavigation.


mobiles Mapping im Vergleich zum terrestrischen Laserscanning
Vergleich von Arbeitsabläufen und deren Übereinstimmung mit Ihren Projektanforderungen
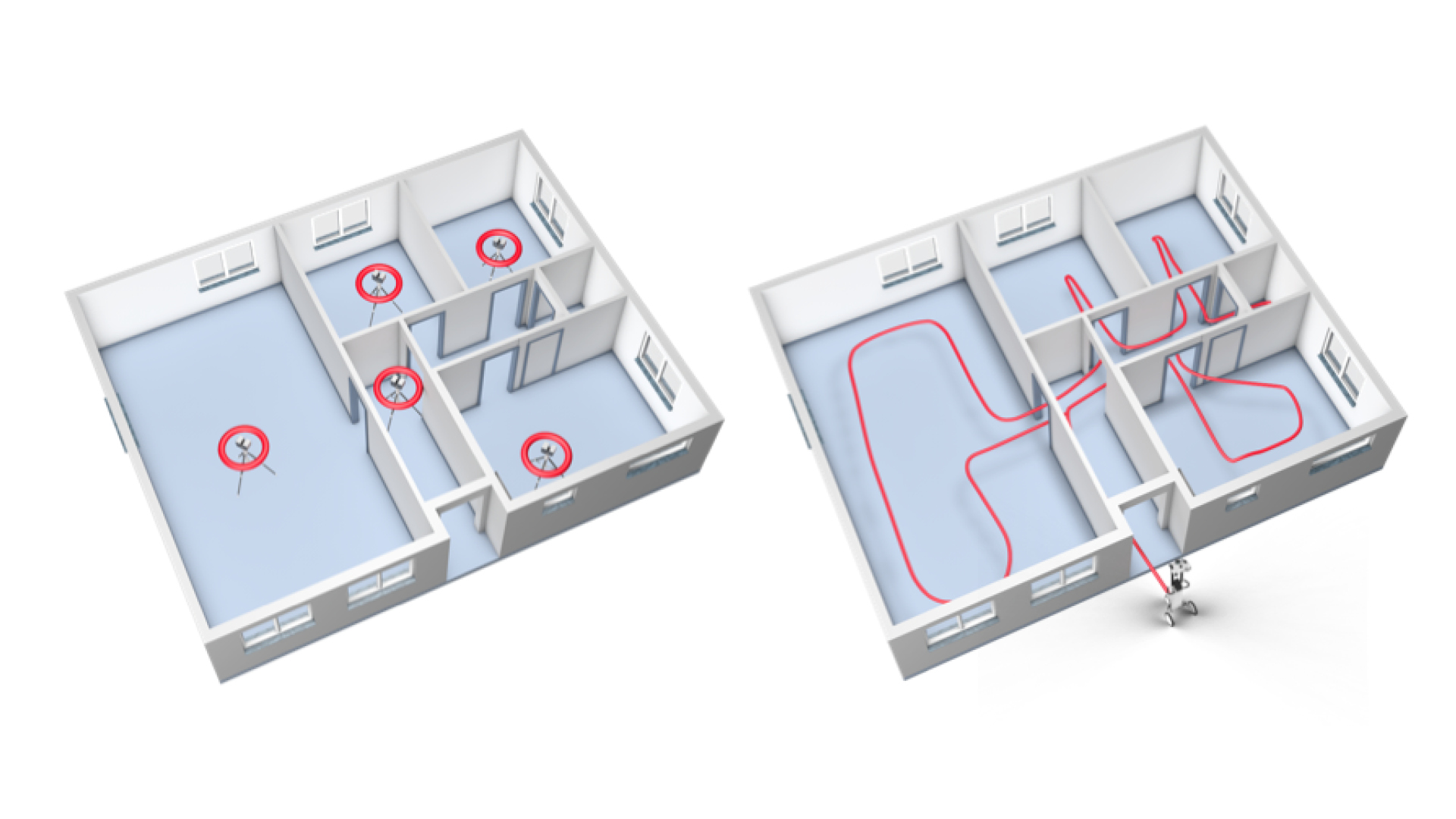
Um die Vorteile der Systeme SLAM und mobiles Mapping zu verdeutlichen, sehen wir uns an, wie sie im Vergleich zu einem TLS bei der Dokumentation einer typischen Büroumgebung abschneiden.
Rechts sehen Sie eine Illustration der Aufstellungen, die Sie benötigen, um diesen komplexen Raum mit TLS und zielbasierter Registrierung zu erfassen. Fügen Sie zusätzliche Aufstellungen in jedem der Türrahmen für die cloud-to-cloud Registrierung hinzu (es sei denn, Sie möchten die Zeit für die Einrichtung von Zielen aufwenden). Fügen Sie zusätzliche Aufstellungen hinzu, wenn die Sicht des Scanners durch Möbelstücke behindert wird, und noch mehr Aufstellungen, wenn Sie die feinen Details von Merkmalen wie Fensterrahmen erfassen möchten.
Mit einem TLS könnte man diesen Bereich in etwa 20 Minuten scannen, aber angesichts der oben genannten zusätzlichen Faktoren ist klar, dass es wahrscheinlich länger dauern würde.
Mit dem Workflow von mobiles Mapping können Sie auf das Stativ verzichten und einfach durch den Raum gehen, um die Aufnahmen zu machen. Sie können sich schnell bewegen und sicher sein, dass Sie alles erwischt haben, was Sie brauchen, während die gleichzeitige Lokalisierungs- und Kartierungstechnologie sich um die Kartierung Ihrer Umgebung kümmert.



Überzeugen Sie sich selbst
Mobiles Mapping war noch nie so aufregend
Die Geschwindigkeit und Skalierbarkeit der Geräte von mobiles Mapping ist so hoch wie nie zuvor, und die Genauigkeit von vermessungstauglich ermöglicht auch die anspruchsvollsten Projekte. Legen Sie selbst Hand an mit NavVis VLX und sehen Sie selbst, was möglich ist. Dieses Tool verkörpert das Neueste auf dem Gebiet der mobiles Mapping und der gleichzeitigen Lokalisierung und Kartierung und bietet selbst bei den anspruchsvollsten Projekten eine unvergleichliche Genauigkeit und Effizienz.