

Im Folgenden erfahren Sie mehr über die SLAM Technologie, einschließlich der Grundlagen ihrer Funktionsweise und Tipps aus der Praxis, um qualitativ hochwertige Ergebnisse zu erzielen mobiles Mapping .
Die Vorteile mobiler Systeme sind in der Kartierungsbranche wohlbekannt. Im Vergleich zu terrestrischen Laserscannern (TLS) bieten diese Werkzeuge schnellere Arbeitsabläufe und eine bessere Abdeckung, was für den Dienstleister eine kürzere Vor-Ort-Zeit und geringere Kosten für die Erfassung bedeutet.
Für erfahrene 3D-Profis können mobiles Mapping Systeme jedoch wie ein riskanter Weg erscheinen, Daten zu generieren, auf die ihr Unternehmen angewiesen ist. Das liegt daran, dass mobiles Mapping Systeme auf Algorithmen zur gleichzeitigen Lokalisierung und Kartierung (SLAM ) beruhen, die einen großen Teil des Kartierungsworkflows automatisieren. Diese Automatisierung kann es schwierig machen, genau zu verstehen, wie ein mobiles Mapping System eine endgültige Punktwolke erzeugt oder wie ein Außendiensttechniker seinen Arbeitsablauf planen sollte, um die bestmögliche Qualität zu gewährleisten.
Um Ihnen dabei zu helfen, wird dieser Artikel die Blackbox öffnen, um SLAM näher zu erkunden. Wir befassen uns mit den Grundlagen der Technologie, wie sie sich auf die Genauigkeit der endgültigen Punktwolke auswirken kann, und schließlich geben wir Ihnen einige praktische Tipps, wie Sie Ergebnisse erzielen, auf die Sie sich verlassen können.
Was ist SLAM?
Simultane Lokalisierung und Kartierung (SLAM) ist ein Algorithmus, der die Daten der eingebauten Sensoren Ihres Kartierungssystems - Lidar, RGB-Kamera, IMU, etc. - um Ihre Flugbahn zu bestimmen, während Sie sich durch ein Objekt bewegen.
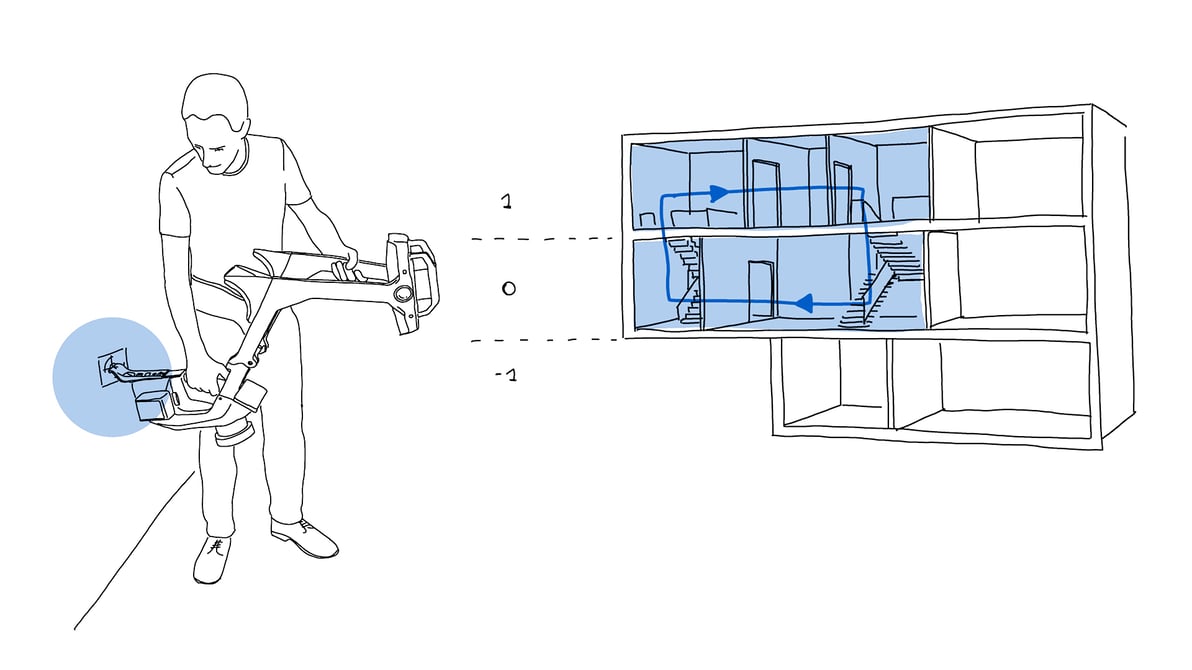
Hier ist eine vereinfachte Erklärung, wie es funktioniert: Bei der Initialisierung des Systems nutzt der Algorithmus von SLAM die Sensordaten und die Computer-Vision-Technologie, um die Umgebung zu beobachten und eine genaue Schätzung Ihrer aktuellen Position vorzunehmen.
Wenn Sie sich bewegen, nimmt SLAM diese Schätzung Ihrer vorherigen Position, sammelt neue Daten von den eingebauten Sensoren des Systems, vergleicht diese Daten mit früheren Beobachtungen und berechnet Ihre Position neu.
"Durch die kontinuierliche Wiederholung dieser Schritte verfolgt das SLAM-System Ihren Weg, während Sie sich durch die Anlage bewegen."
SLAM ist ein komplexer Prozess - selbst in der obigen vereinfachten Erklärung - aber man kann ihn sich wie die Polygonzugmethode in der Vermessung vorstellen. Bei einem Polygonzug nimmt Vermesser:in Messungen an einer Reihe von Punkten entlang einer Vermessungslinie vor. Wenn der Vermesser:in sich bewegt, um jeden neuen Punkt zu messen, werden die vorherigen Punkte als Grundlage für die Berechnungen verwendet.
Ein SLAM Algorithmus führt diese Art von präzisen Berechnungen unzählige Male pro Sekunde durch. Anders ausgedrückt: Ein SLAM Algorithmus ist eine ausgeklügelte Technologie, die automatisch eine Traverse durchführt, während Sie sich bewegen.
.png?width=1920&name=MicrosoftTeams-image%20(9).png)
Wie SLAM die Genauigkeit beeinflusst
Um die Genauigkeit eines SLAM Geräts zu verstehen, müssen Sie einen wichtigen Unterschied in der Art und Weise verstehen, wie Kartierungssysteme Daten erfassen.
Ein terrestrischer Laserscanner (TLS) erfasst eine Umgebung, indem er einen Lasersensor um 360° dreht und Messungen der Umgebung vornimmt. Da er von einem festen Standort aus feuert, ist jede Messung in der von ihm erfassten Punktwolke bereits genau im Raum relativ zum Scanner ausgerichtet.
Ein mobiles Mapping System dreht ebenfalls einen Lasersensor um 360°, allerdings nicht von einem festen Standort aus. Da Sie beim Scannen gehen, bewegen Sie auch den Sensor, während er sich dreht. Dies führt bei jeder Messung zu Ausrichtungsfehlern und verschlechtert die Genauigkeit der endgültigen Punktwolke.
Ein ähnliches Phänomen haben Sie schon erlebt, wenn Sie nachts ein Foto gemacht und die Kamera bewegt haben, was zu Unschärfe führte. Wenn Sie sich die Rohdaten eines mobiles Mapping Systems ansehen, bevor sie von einem SLAM Algorithmus bereinigt wurden, werden Sie feststellen, dass die Punkte unordentlich aussehen und im Raum verteilt und verdoppelt sind.
Das System mobiles Mapping wurde entwickelt, um diese Ausrichtungsfehler zu korrigieren und eine saubere, genaue Punktwolke zu erzeugen. Dazu verwendet es die vom Algorithmus SLAM aufgezeichnete Trajektorie. Anhand dieser Daten kann es den Standort des Scanners zum Zeitpunkt der Erfassung jeder einzelnen Messung bestimmen und diese Punkte genau im Raum ausrichten.
Das bedeutet, dass die Genauigkeit eines SLAM-gestützten mobiles Mapping Systems nicht nur von der Genauigkeit des Sensors selbst abhängt. Sie hängt auch stark davon ab, wie gut der SLAM Algorithmus Ihre Flugbahn verfolgt.
SLAM-Genauigkeitsfehler
Bei der Entwicklung von SLAM Algorithmen, die Ihre Flugbahn genau verfolgen und eine hochwertige Punktwolke erzeugen, standen die Hersteller vor der großen Herausforderung, zwei Hauptfehlerarten zu korrigieren.
Die erste wird als Trackingfehler. Ortungsfehler treten auf, weil die Algorithmen von SLAM Probleme mit bestimmten Umgebungen haben können. In einem langen Flur zum Beispiel fehlen normalerweise die Umgebungsmerkmale, auf die sich SLAM verlässt, was dazu führen kann, dass das System Ihren Standort nicht mehr verfolgen kann.

Die zweite Art von Fehler wird als DriftDrift tritt auf, weil der Algorithmus SLAM Sensordaten verwendet, um Ihre Position zu berechnen, und alle Sensoren Messfehler erzeugen. Aufgrund der Funktionsweise der SLAM Algorithmen - die jede Position auf der Grundlage früherer Positionen berechnen, wie bei einer Traverse - häufen sich die Sensorfehler beim Scannen. Dies führt dazu, dass die Genauigkeit der Trajektorie auf "Drift" sinkt und die Qualität der Endergebnisse beeinträchtigt wird.
Wenn Sie mit einem früheren mobiles Mapping System gescannt haben, haben diese Fehler höchstwahrscheinlich die Qualität Ihrer endgültigen Daten beeinträchtigt.
Arbeitsschritte zur Gewährleistung hochpräziser Ergebnisse
Die gute Nachricht ist, dass die mobiles Mapping Technologie seit ihrer Markteinführung erheblich gereift ist. Die Hersteller haben ausgereifte SLAM Algorithmen entwickelt, die Tracking-Fehler und Drift automatisch reduzieren. Und mobile Kartierer bieten jetzt zuverlässige Verfahren zur manuellen Korrektur von Fehlern an, sodass Sie die Genauigkeit Ihrer endgültigen Punktwolke maximieren können.
Das gängigste Verfahren zur Fehlerkorrektur wird als Loop Closure. Um eine Loop Closure durchzuführen, kehren Sie einfach zu einem Punkt zurück, der bereits gescannt wurde, und SLAM erkennt überlappende Punkte. Damit verfügt es über alle Informationen, die es benötigt, um die aufgetretenen Drift oder Spurfehler zu berechnen und die notwendigen Korrekturen vorzunehmen. Sie können sich Loop Closure als einen Prozess vorstellen, der den Abschluss eines Polygonzugs automatisiert.
Obwohl Loop Closure in großen Räumen wie Sporthallen, im Freien oder sogar in großen Büros sehr effektiv ist, gibt es Umgebungen, die Loop Closure erschweren (z. B. die oben untersuchten langen Flure).
Für diese Fälle bieten die fortschrittlicheren Systeme von mobiles Mapping eine Funktion zum Festhalten der Scandaten an Kontrollpunkten. Auch dieser Prozess ist einfach: Platzieren Sie Vermessungskontrollpunkte, z. B. schachbrettartige Ziele, auf dem zu erfassenden Objekt. Erfassen Sie anschließend die Koordinaten mit einem System, das eine höhere Genauigkeit als das System mobiles Mapping aufweist, z. B. mit einer Totalstation.
Während Sie das Objekt scannen, erfassen Sie die Kontrollpunkte. Das System mobiles Mapping verwendet diese Informationen, um die mobile Punktwolke an Ort und Stelle einzurasten, Fehler zu reduzieren und die Genauigkeit von vermessungstauglich selbst in den schwierigsten Umgebungen zu gewährleisten. Wenn Genauigkeit von größter Bedeutung ist, ist dies die richtige Methode.
Der SLAM-Algorithmus ist entscheidend
An dieser Stelle ist es wichtig zu erwähnen, dass jeder Hersteller einen eigenen SLAM Algorithmus in seinen Systemen verwendet. mobiles Mapping Systeme verwendet. Diese Algorithmen können auf den ersten Blick ähnlich aussehen, aber die Unterschiede zwischen ihnen können zu erheblichen Unterschieden in der endgültigen Datenqualität führen.
Aus diesem Grund ist der wichtigste Schritt, den Sie tun können, um qualitativ hochwertige Ergebnisse zu erzielen, die Recherche über ein mobiles Mapping System während des Kaufprozesses und die Kenntnis der richtigen Details über die SLAM , die es antreibt.
Erfahren Sie, welche Methoden der SLAM Algorithmus zur Korrektur von Fehlern unterstützt. Kann er Loop Closure und Kontrollpunkte verwenden? Wie gut funktionieren diese Methoden in den von Ihnen zu erfassenden Umgebungen? Wie kommuniziert der Hersteller die relative und absolute Genauigkeit, die Sie mit diesen Methoden erreichen können?
Erfahren Sie, wie gut der Algorithmus SLAM in schwierigen Situationen funktioniert. Welche Genauigkeit kann er in langen, engen Korridoren erreichen? Oder in großen, offenen Räumen? Wie geht er mit spiegelnden Oberflächen um? Oder mit sich bewegenden Objekten, wie z. B. vorbeigehenden Personen? Gelingt es ihm, den Scan in einer Vielzahl von Umgebungen zu nivellieren?
Die Antworten auf diese Fragen geben Aufschluss darüber, welche Art von Datenqualität Sie von einem mobilen Mapper erwarten können, und helfen Ihnen, ein Tool zu finden, auf das Sie sich in den Umgebungen, die Sie bei Ihrer täglichen Arbeit scannen, verlassen können.
Fazit
Ein Algorithmus von SLAM verwendet Sensordaten, um automatisch Ihre Flugbahn zu verfolgen, während Sie mit Ihrem mobilen Mapper durch ein Objekt gehen. Die Kartierungssoftware wiederum nutzt diese Daten, um Ihre Punktwolke korrekt im Raum auszurichten.
Aufgrund der Funktionsweise der SLAM Algorithmen ist die mobiles Mapping Technologie von Natur aus anfällig für bestimmte Arten von Fehlern - einschließlich Tracking-Fehlern und Drift-, die die Genauigkeit der endgültigen Punktwolke beeinträchtigen können.
Trotzdem haben die Benutzer einen großen Einfluss auf die Qualität des Endergebnisses. Durch die Investition in ein mobiles Mapping System, das Fehler während des Scanvorgangs wirksam reduziert, und die anschließende Durchführung der notwendigen Arbeitsschritte zur manuellen Korrektur von Fehlern können Kartierungsexperten qualitativ hochwertige Ergebnisse erzielen, auf die sich ihr Unternehmen verlassen kann.
Um unsere validierten Testdaten zur Genauigkeit von NavVis M6 und NavVis VLX in einer Vielzahl von anspruchsvollen Umgebungen zu sehen und zu erfahren, wie sehr die Funktionen von SLAM Loop Closure und Kontrollpunkt die Qualität der Endergebnisse verbessern können, laden Sie hier unser White Paper herunter.
Sean Higgins ist ein unabhängiger Technologieautor, ehemaliger Redakteur von Fachzeitschriften und Outdoor-Enthusiast. Er ist der Meinung, dass klares, schlagwortfreies Schreiben über 3D-Technologien ein öffentlicher Dienst ist.